
1. OVERVIEW
What are Distance Sensors?
When it comes to measuring elements in the real world, one of the most common cases is distance. Distance sensors can be found in many everyday objects, from smartphones to self-parking cars, and even for detecting defects in Space Shuttle windows. Most often, they are used to sense an object's proximity to other objects, or as range measurement tools. As technology continues to develop, the range of use for distance sensors will expand, especially in the area of object recognition and reconstruction. With this growth, more people and businesses are choosing to incorporate distance sensors into their lives and products.
Distance sensors operate in a variety of ways. A few of the most common ways are:
Ultrasonic
- These sensors transmit sound waves and wait for the waves to bounce back at them; the time that waves spend in transit can be used to determine the distance of a nearby object.
- These sensors cannot be used in places where the speed of sound is altered (such as in space), but since they do not require light to determine distance, they can operate completely in the dark.
- Ultrasonic sensors are often used in factories, to determine if machinery is moving or not.
Infrared
- Infrared sensors work on the principle of reflected light waves, similar to ultrasonic sensors.
- These sensors do not work in conditions where light is obstructed, or in very dark conditions; however, they do perform well at different tasks than ultrasonic sensors in well-lit conditions.
- Infrared sensors are often used in cars, to alert the driver when they are going to hit someone or something while parking.
Time of Flight (ToF)
- This is the term used to describe a common type of sensor that measures distance in the amount of time it takes for a signal to be sent and return to a point of origin.
DOES YOUR PROJECT NEED A DISTANCE SENSOR?
We at JIG-SAW Inc. are pleased to announce that we have added support for the following distance sensors:
| Maker | Model | Type | Cost |
|---|---|---|---|
| Sharp Corporation | GP2Y0A21YK | Infrared | ¥ |
| STMicroelectronics | VL53L0X | Time of Flight | ¥ |
| DFRobot | SRF02 | Ultrasonic | ¥¥ |
| DFRobot | SRF08 | Ultrasonic | ¥¥¥ |
2. OVERALL IMPRESSIONS
VL53L0X: High precision at a medium range, but for a very competitive price. GP2Y0A21YK: Cheap, marginally reliable sensor at a low range. SRF02: Decent precision at a wide range, and slightly higher cost. SRF08: Great for high precision and high reliability at a wide range, if you are willing to pay a high cost.
3. ENGINEER'S NOTES
In order to make use of these sensors possible, we performed a full range of tests and calibrated them thoroughly. Our engineers have provided the following technical summary of the information on each sensor, and how it performs on the neqto Bridge.
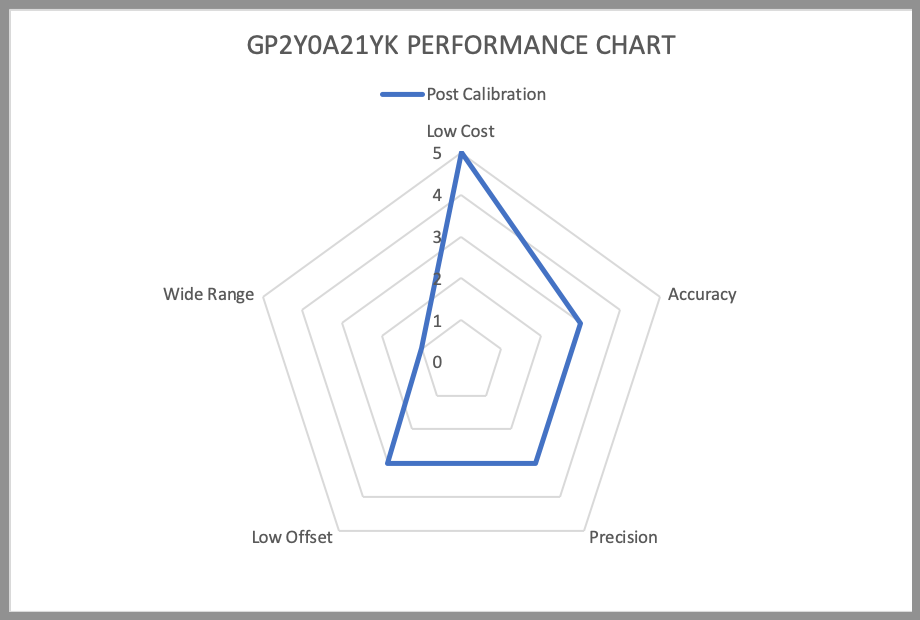
SHARP GP2Y0A21YK - IR Sensor
Specifications
- Rated Range -> 0.10m - 0.80m
- Optimal Range -> 0.10m - 0.45m
Developer Comments
- This is an analog sensor, so an ADC (Adafruit ADS1015) was used to interface with neqto bridge.
- The sensor performed well in low range but gave very unreliable readings with noise after 0.5m.
Best Applications
- For short-range applications, like parking assistance
- After mapping the ADC values, the sensor was found to behave very scattered values, but due to the nature of IR sensing, it is useful in applications with fast-moving targets.
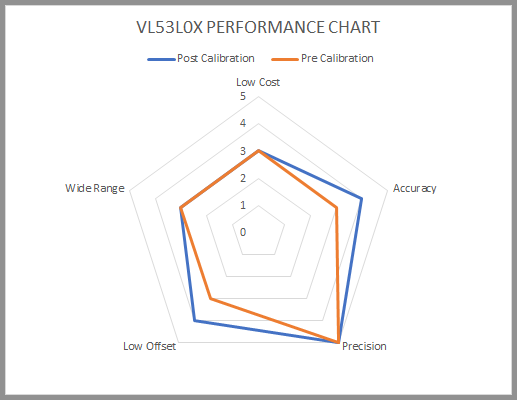
STM VL53L0X - Time Of Flight Sensor
Specifications
- Rated Range -> 0.03m - 2.00m (White Target), 0.03m - 0.80m (Grey Target)
- Optimal Range -> 0.0m - 1.20m
Developer Comments
- Sensor gave unreliable readings after 1.2m (due to testing conditions)
Best Applications
- For medium-range accurate readings
- Unsuitable for testing in areas with low reflectivity
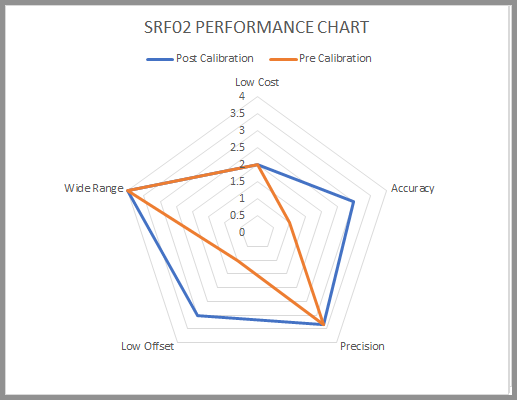
SRF02 - Ultrasonic Sensor
Specifications
- Rated Range -> 0.16m - 6.00m
- Optimal Range -> 0.25m - 3.00m
Developer Comments
- Works well in low and medium ranges
Best Applications
- Tanks to measure water level
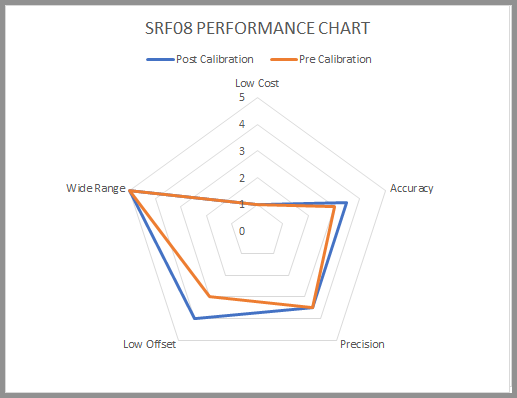
SRF08 - Ultrasonic Sensor
Specifications
- Rated Range -> 0.03m - 6.00m
- Optimal Range -> 0.01m - 3.00m
Developer Comments
- Works well in low, medium and high ranges
Best Applications
- Detecting human presence
- Good for tasks requiring high accuracy/precision
4. CONCLUSIONS
Compared to other sensors, the GP2Y0A21YK infrared sensor showed low precision, accuracy, high offset, and poor linearity. It might perform better with calibration, but its use currently is limited to high-speed targets, where it might perform better than its counterparts. More analysis is required for a conclusive comparison.
The VL53L0X sensor worked well in a small subset of range with high precision, accuracy, high linearity, and low offset. However, its restricted range reduces its usability.
The SRF02 and SRF08 ultrasonic sensors performed well without calibration on most ranges and also proved to be very precise, accurate, and linear with negligible offset. However, the SRF08 performed better on the entire range when compared to the fluctuating performance of the SRF02.